
一 、前言
本文主要介绍台达AH20MC通过DMCNET总线控制台达A2-F伺服实现COG制程设备ACF粘贴、IC对位、预压和本压等工作的方法及使用AHCPU的串行通讯口和COMRS指令与其它品牌视觉产品进行通信的方法。
手机、平板电脑、液晶电视、触控屏等电子产品在现代生活与生产中带给了人们极大的方便,这都归功于一个产品的应用与推广:LCD(LiqiudCystalDiaplay),即液晶显示屏。LCD通常需要与驱动IC、外围电路、背光源和结构件等一起组成LCM(Liquid
Cystal Display Modual),即液晶显示模块,进而用于各种电子产品。
COG,即Chip On Glass,是一种将IC通过ACF(Anisotropic Conductive Film:各向异性导电膜)直接绑定到LCD的工艺。这种工艺能大大减小LCM(液晶显示模块)的体积,是未来IC与LCD连接的主要方式。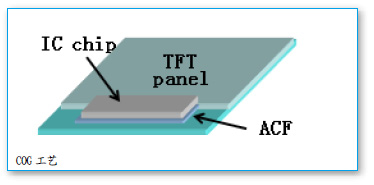
二、设备概述与控制要求
1. 设备概述
COG制程设备,即用来实现COG工艺的设备。该类型设备通常由ACF贴附、取IC、IC对位和预压、本压等几部分组成,各部分间通过机械手传送物料。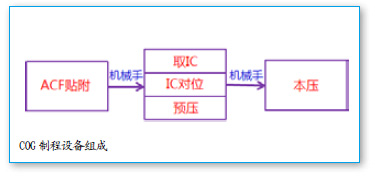
■ ACF贴附
通常是一个XYZ工作平台,用于将ACF卷料转移贴附至LCD指定位置。
■取IC
通常是一个XYZ的直角坐标取料臂,用于取放IC。
■IC对位和预压
IC对位是整个设备要求精度高的部分,定位精度通常是10~20μm,同时要求保证效率。预压则是为了保证IC的安装精度,使LCD在被搬移至下道工序时不会造成IC移位。
■本压
这也是设备非常关键的部分,需要精确的温度、压力、时间控制,以保证ACF中的导电粒子在IC与LCD的电极间导通。
2.客户设备控制要求
■18轴总线型顺序控制,没有插补联动要求。
■ 伺服有两种停止的方式:一是通过机台上的急停开关即时控制伺服ON/OFF,这是断使能的停止;二是通过HMI上的暂停开关实现伺服不断使能的停止。
■ PLC能实时监示伺服报警状态和各轴正、反极限开关及原点开关的感应情况。
■ PLC、HMI与PC间以Ethernet方式通讯。
■ PLC需与机器视觉配合(RS232通讯),实现IC在LCD上的精确对位。
三、台达AH500控制方案
根据客户要求,确认台达AH500控制架构如下图: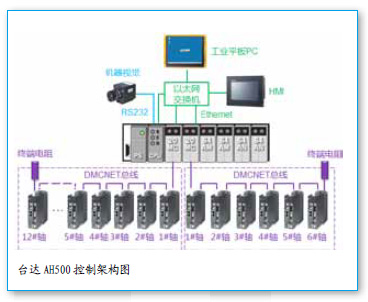
该方案特点:
■DMCNET总线控制:1个AH20MC模块可带12轴,18轴用2个AH20MC模块,采用“12轴+6轴”的组合方式。该总线方案较其它品牌的脉冲型控制方案,具有省配线、控制速度快(通讯速率可达10Mbps)、可靠性高的优点。
■ 伺服ON/OFF和伺服状态监控通过DMCNET总线进行,简便快捷。
■CPU、AH20MC、PC和HMI间通过以太网交换机通讯;还可通过交换机给CPU、AH20MC、PC和HMI下载程序,即所有下载线只要一根网线即可。
■AHCPU自带一个Ethernet通讯口和COM1通讯口,其中的COM1通讯口可设定RS232/485/422方式与视觉通信。
四、程序实现方法
关于CPU的硬件组态和编程方法,CPU、AH20MC、HMI与PC通过交换机的Ethernet通讯,伺服的接线与参数设置这里不再叙述,可查阅相关手册。这里着重对以下两个方面进行介绍:
1. AH20MC控制流程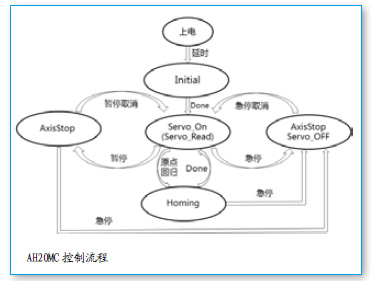
由于AH20MC采用总线通讯控制伺服,有控制时序的问题,因此要求上电通讯初始化、伺服ON/OFF、原点回归、伺服参数读写等操作分时序进行,相互间的跳转关系如上图所示。图中“急停”表示断伺服使能的停止,“暂停”为不断伺服使能的停止。
■DMCNET通讯初始化
DMCNET通讯初始化,通过DMCControllnit功能块来实现,用于设置各个伺服的电子齿轮比和将AH20MC与伺服作控制状态对应,开机后只要操作一次即可,也是后续所有操作的第一步。初始化完成后,伺服默认处于ServoOn的状态。
■伺服ON/OFF
即控制伺服驱动器是否输出电流给马达,采用DMCPowerUp功能块来实现: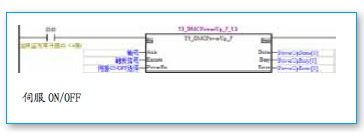
当功能块的PowerEn为ON时,Excute的上升沿会使伺服ON;当PowerEn为OFF时,Excute的上升沿会使伺服OFF。
■原点回归
伺服处于ServoOn的情况下,可使用DMCServoHoming功能执行原点回归: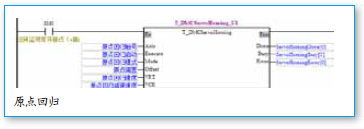
注意此处VRT、VCR的单位为马达转速(RPM)。
■伺服参数读取
伺服在ServoOn,又未处于通讯初始化、原点回归状态下,可进行伺服参数读取: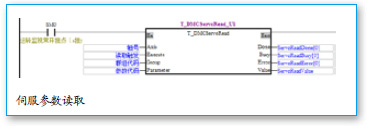
客户要求监控伺服报警状态和伺服CN1
DI端子状态,可采用DMCServoRead功能块读取伺服P0-01(驱动器目前报警代码显示:P0-01≠0,表示有报警产生)和P4-07(数字输入接点多重功能)的值来判断。另外目前也支持设置伺服P0-35=Ox00010407(映像参数P0-25的映像目标设定:High
Word为伺服报警代码,Low Word为伺服CN1
DI端子状态),然后直接在SRmn70、SRmn71(mn=10~25,对应1~16号轴)中取用伺服报警状态和CN1 DI端子状态即可。
■JOG手动和绝对/相对定位
在Servo ON状态下,使用JOG、AbsSeg和RelSeg功能块来实现。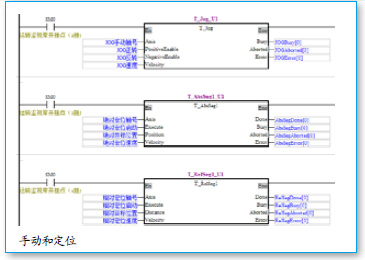
2. AHCPU与某品牌视觉产品通讯
客户要求以16#0D5C作为结束字符来接收视觉数据。可使用COMRS指令来实现: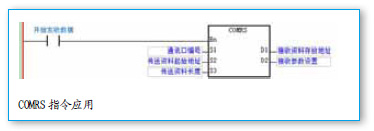
S1—通讯口编号(S1=1:COM1,S1=2:COM2)
S2—传送资料起始地址
S3—传送资料长度
D1—接收资料存放地址(D1+0:接收资料长度,D1+1~D1+n:接收资料存放地址)
D2—接收参数设置(D2+0:接收模式,D2+1:接收条件),如下表所示:
设置[S1]=1,[D2+0]=K3,[D2+1]=H0D5C,即表示通过CPU模块的COM1口,以16#0D5C作为结束字符来接收视觉数据。下图为现场使用COMRS指令收发的CPU与视觉通讯数据: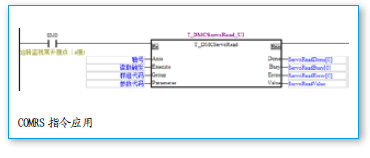
五、项目总结
台达AH500在COG制程设备上的成功应用,是对台达AH500产品性能的一次综合考评。该项目的实施开拓了AH500新的市场增长空间,也为AH500在其他行业的应用打下了基础。

 川公网安备51012202001782
川公网安备51012202001782