
|
HM-40602-W系统
1 前言
在发达国家,机器人己广泛地应用于工业、国防、科技、生活等各个领域。在现今的生活上,科技日新月异的进展之下,机械人手臂与有人类的手臂区别就在于灵活度与耐力度。也就是机械手的优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力,工业机械手机器人的一个重要分支。
图1

图2
1.1 设计目标
a) 经过市场调研和大量的实例,提出以水平多关节机器HM-40602-W完成搬运和码垛排序。
b) 水平多关节机器HM-40602-W能够完成左右旋转、上下升降和手腕的360°旋转,我们的来料在输送链上呈自由摆放姿态,机械手要完成抓取和搬运,如何实现?
要完成以上动作就需要给机械手装上“眼睛”和“大脑”,由“眼睛”来完成工件的姿态捕捉,再由“大脑”来完成逻辑的判断和完成动作。“眼睛”就是我们所说的视觉系统,“大脑”就是机械手的控制系统。
c) 通过由机械手来代替人工,解放高危工种、实现更高的效率。
1.2 设计原则
1) 必须满足客户对产品功能和服务的要求。工程机械提供给客户的不仅是产品的功能,还包括支持这些功能的售后服务。因此设计过程中既要针对产品的不同功能特点,又要使产品具有良好的维修方便性。
2) 符合国家的产业发展政策和有关的法令、法规。
3) 坚持标准化、通用化、系列化的“三化”原则。
4) 符合社会对环境保护的要求。
5) 符合技术创新的规律,重视对知识产权的保护。
6) 从企业的实际工艺水平和生产能力出发,强调设计与工艺、生产相结合。
1.3 设计依据和参考标准
1) Scara 机器人是一种由三个自由度组成的平面关节型机器人,它的主要作用是可以完成精密仪器和物体的搬运和移动。由于体积小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机械业等领域。整个系统由机器手,机器臂,关节,电机驱动系统等组成。通过各自由度电机的驱动,完成机器手,机器臂的位置变化。具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输出轴和壳体的设计,电机的选择等。在校核满足其结构强度的基础上,我们对scara 机器人手爪进行设计。
2) 目前,国外已有各种专用和通用的装配机器人在生产中得到应用,主要类型大致有直角坐标型、圆柱坐标型和关节型三大类。关节型装配机器人又有垂直关节型(即空间关节型)和平面关节型(即SCARA型)两种。具统计资料介绍,在这些装配机器人中,平面关节型装配机器人是应用数量多且较为广泛的一种装配机器人。1991年世界上4万余台在生产上应用的装配机器人中,SCARA机器人约占3/4左右。其主要应用领域为电子电气业、家用电器业、精密机械业。从事印刷电路板上电子元器件的插入作业家用电器及仪器仪表的组装作业:小型电器开关、接触器等电器产品的组装作业。可以说,SCARA型机器人在轻型、较简单且要求机器人价格较低的装配作业中大显了身手。
1.3.1 适用范围
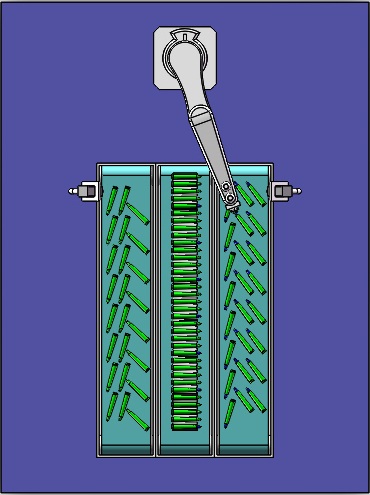
HM-40602-W系统是对我们枪械子弹搬运和码垛设计的专机,本套系统只能运用于枪械子弹的姿态寻找、姿态定位和排序码垛。
2 系统概述
HM-40602-W系统是由四大部分组成,分别是Scara平面关节机器人、控制中枢、视觉系统、输送系统和气动夹爪。
2.1 系统的主要功能
2.1.1 Scara平面关机机器人
Scara平面关节机器人负责搬运和动作的实施,落实枪械子弹的姿态纠正和从来料输送链抓取子弹并将纠正姿态后的子弹运送和码垛到弹夹上。
2.1.2 控制中枢
控制中枢是负责将采集的信息进行逻辑判断,假如判断不通过继续采集信息判断,判断通过则进入下一个步骤,直到完成整个动作流程。
2.1.3 视觉系统
视觉系统负责采集信号并上载信号给控制中枢,如果与控制中枢储存信息不一致做出判断,上载信号给控制中枢,控制中枢发指令给机械手做出姿态调整,达到调整完毕的姿态与控制中枢储存信息一致。
2.1.4 输送系统
输送系统是将物料从来料源头,将物料输送到指定位置。
2.1.5 气动夹爪
选用德国著名品牌气动夹爪,雄克(SCHUNK)公司是德国著名的精密夹具和自动化抓取系统制造商,也是静压膨胀式夹具系统生产厂和标准及特种卡爪生产厂商。选用JGP40-1二指平动机械手配合设计枪械子弹设计专用工装,能够快速的抓取子弹。
图3
图4
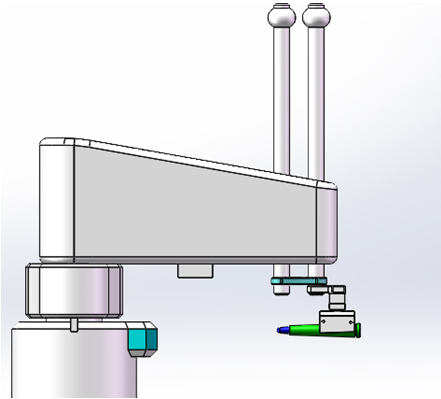
图5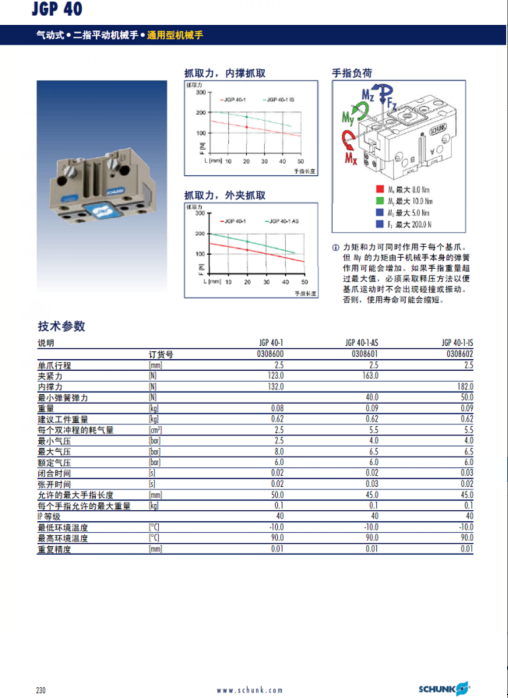
3 系统结构和配置
3.1 系统总体逻辑结构
系统总体逻辑结构如图所示。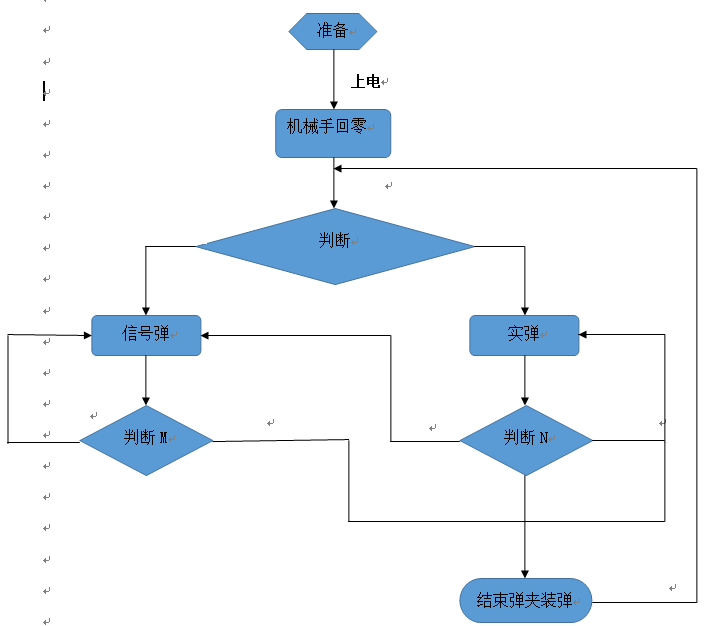
系统总体逻辑结构图
3.2 技术参数
1) 机器人参数
重复定位精度:±0.02mm~±0.025mm
标准循环时间:约0.2s≤~<0.3s及0.3≤~<0.4s
合成速度可达到:8780mm/s~±11450mm/s
可搬运质量:Max10kg含机械手抓
臂工作范围:±600mm
设置方法:地面安装或吊装
符合标准:ANSI及CE标准
2) 系统参数
码垛速度:100颗/min
4 电气概述
4.1 电气拓扑结构
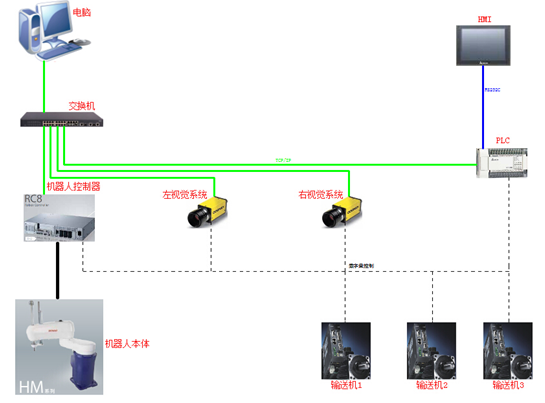
如上图所示,机器人控制器,2台视觉系统,PLC全部进交换机。如果,有需要交换机可以进PC,采集和控制机器人、视觉系统、PLC。同时,在本地PLC与HMI通讯。终上即可以实现本地控制,也可以实现远程控制与监控。
4.2 HMI概述
如下图所示,HMI初步选用台达 高彩高分辨率宽屏人机界面 质量可靠,性能稳定,功能强大,性价比高。支持网络,串口等多种通讯方式。在整个网络搭建的时候,方便灵活。
在程序设计和调试好以后,可以扩展很多功能,如大容量的历史记录和故障记录,动画功能可以更形象的展示当前的工作状态等。同时可连接打印机等外部设备,将每天的生产记录,成品率,完成率等,以纸质的形式归档。
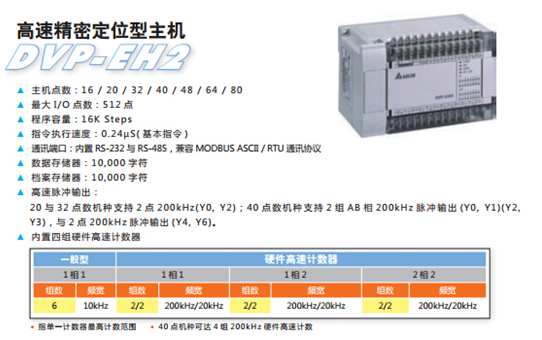
4.3 PLC概述
PLC采用台达高速精密定位型EH系列主机,性能稳定,功能强大,运算速度快,程序和数据存储量大,支持多种通讯方式。
同时,增加一个EN01扩展模块,可以将PLC接入Ethernet网络,将整个系统,实现总线控制。结构简单,功能强大。

4.4 机器人概述
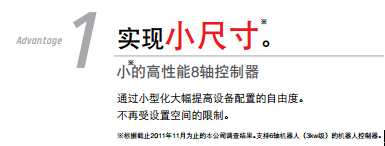
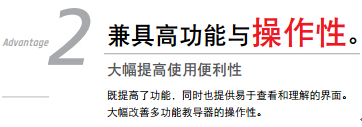
机器人和控制器采用国际著名品版DENSO。同时机器人控制器还有如下特点:
1.通过小型化提高了设备配置的自由度,不受设置空间的限制。
2.兼具高功能与操作性,大幅提高使用便利性。
3.使规格和标准趋于均衡,加强环境对应能力,支持全球80%的网络。
4.可以边接及控制多种设备,通过自定义功能满足多样化的需求。

机器人本体参数如下所示,经过精确的计算和论证,以下机器人无论是在速度、响应性、稳定性方面,都能完全满足,方案的设计要求,并且预留有足够的余量,以保证全安性和可扩展性。

4.5 其它
为了满足整个设备系统的快速性和稳定性,低压元器件全部采用国际知名品牌施耐德电气,同时视觉系统初步选用康耐视。

 川公网安备51012202001782
川公网安备51012202001782