
|
激光切割板料自动搬运方案
一、 概述
1. 项目概述
甲方目前使用人工搬运方式,将所需切割板料搬运到激光数控切割机。此搬运方式需要至少两个人配合,且劳动强度大。为了解决目前情况,我公司专门设计自动物料搬运设备,此设备只需一人操作,通过按钮手动控制抓取物料后即可自动上料并返回取料位置。
2. 基本设计参数
此方案只满足以下参数,若需要扩展,需重新评估:
3. 主要设备布置图及配置清单
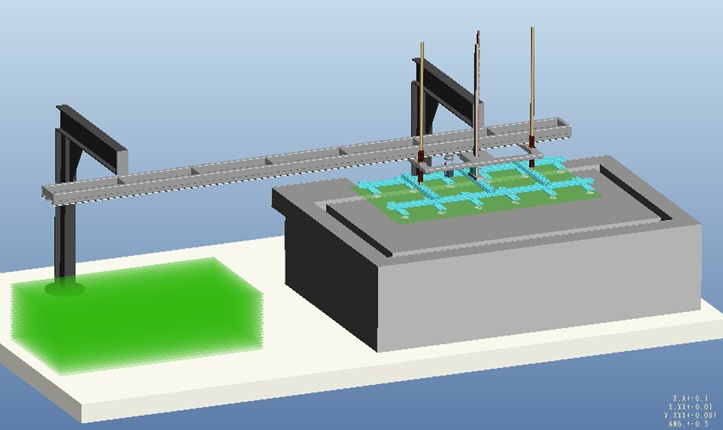
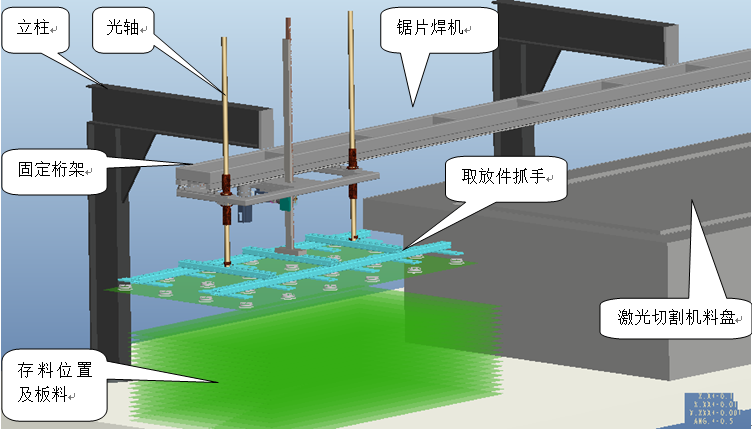
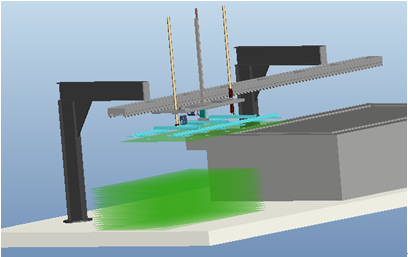
1) 三维布局图:
2) 主要设备清单
主要设备清单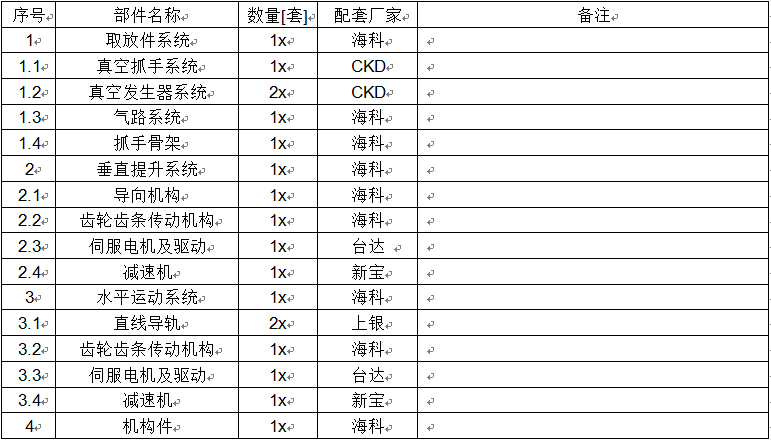
注:如以上配置发生变动,须有双方确认的书面文件。
二、 系统功能及设备功能简述
此系统为实现激光切割机焊机的半自动上下料而特别设计的。本系统由垂直提升系统和水平运动系统及取放件系统等构成;配套自动化控制系统和智能界面,实现人工手动控制取件,完成板料自动搬运、自动放料、自动归位的自动化上下料过程。
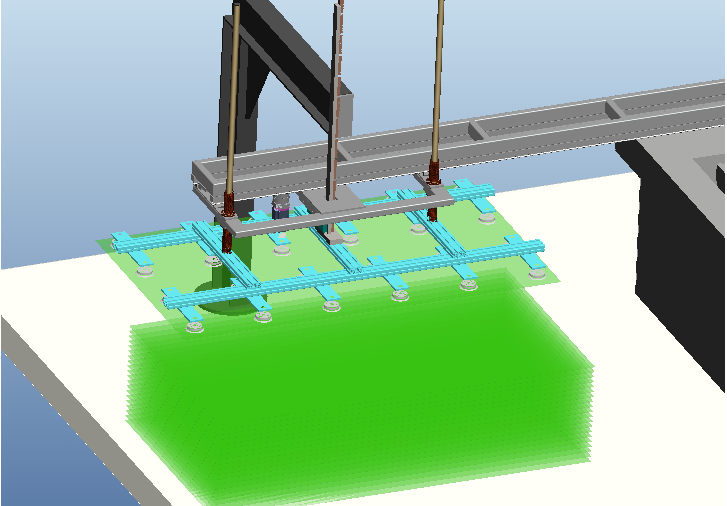
1. 取放件系统
本系统选用日本著名品牌CKD真空吸盘抓取板料,采用铝型材制作抓手骨架。合理布置真空吸盘位置确保抓取工件的为的可靠性。
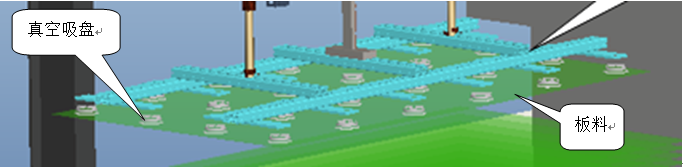
气路为了提高真空吸盘啊可靠性,我们使用两组真空吸盘并配备两套独立的真空发生系统,在一套系统发生故障时不至于工件掉落,提高设备的安全性。气路系统还配置了储气罐,以及双线包电磁阀,在设备突然断电后还能在一定时间内保证真空发生器的供气,工件在此不会突然掉落,给工人足够的时间取下工件。
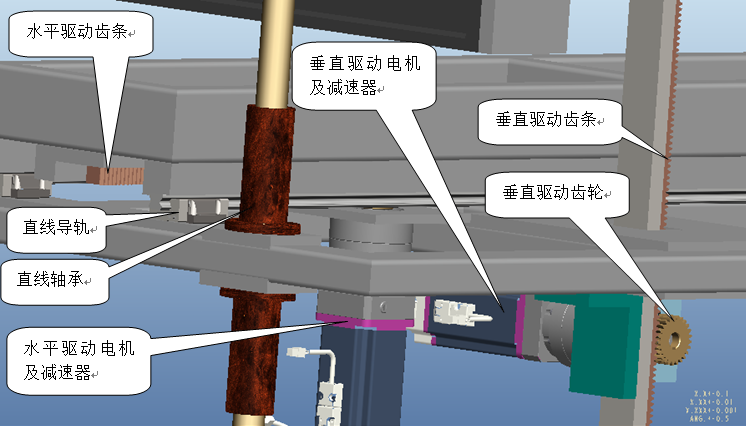
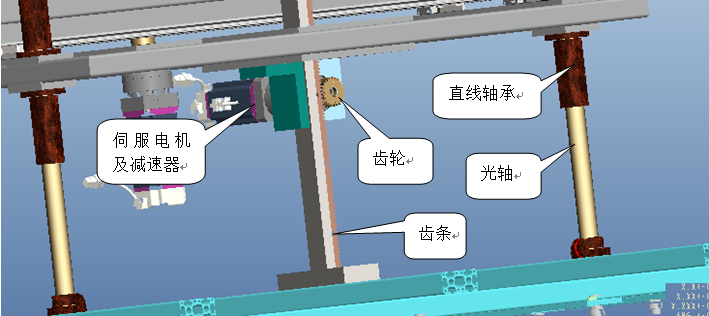
2. 垂直提升系统
本系统导向采用双直线轴承+光轴设计,采用轴支座固定光光轴。
传动系统采用齿轮齿条传动,并配置台达带刹车的伺服电机(确保断电后还能保证抓手部件下滑)以及新宝减速器。齿轮齿条运动平稳可靠,并且性价比极高,此设计可以有效减轻甲方的采购成品。
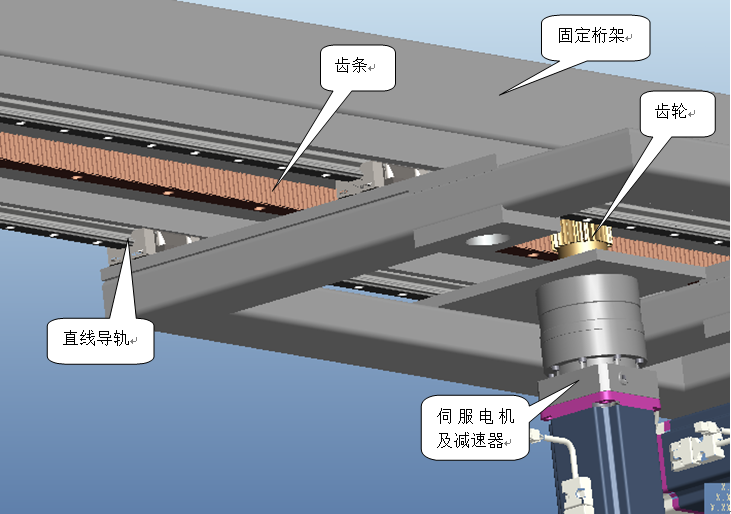
3. 水平运动系统
本系统导向采用双直线导轨设计,直线导轨倒置安装。
传动系统采用齿轮齿条传动,并配置台达伺服电机及新宝减速器。齿轮齿条运动平稳可靠,并且性价比极高,此设计可以有效减轻甲方的采购成品。
4. 结构件
结构件采用型材焊接而成。
为了适应现场结构运送板料的方便,我们采用厂字形设计,有效的减小的占地面积,而且前面有足够的操作空间。

 川公网安备51012202001782
川公网安备51012202001782