
|
CK6140车床机械手上下料系统
1. 前言
由于工业自动化的全面发展和科学技术的不断提高,对工作效率的提高迫在眉睫。单纯的手工劳作以满足不了工业自动化的要求,因此,必须利用先进设备生产自动化机械以取代人的劳动,满足工业自动化的需求。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。
1.1 设计目标
目前,我国大多数工厂的生产线上数控机床装卸工件仍由人工完成,其劳动强度大、生产效率低,而且具有一定的危险性,已经满足不了生产自动化的发展趋势。为了提高工作效率,降低成本,并使生产线发展成为柔性制造系统,适应现代机械行业自动化生产的要求,针对具体生产工艺,结合机床的实际结构,利用机械手技术,设计用一台上下料机械手代替人工工作,以提高劳动生产率。本机械手主要与数控机床组合形成生产线,实现加工过程的自动化和无人化。
1.2 设计原则
1) 必须满足客户对产品功能和服务的要求。工程机械提供给客户的不仅是产品的功能,还包括支持这些功能的售后服务。因此设计过程中既要针对产品的不同功能特点,又要使产品具有良好的维修方便性。
2) 符合国家的产业发展政策和有关的法令、法规。
3) 坚持标准化、通用化、系列化的“三化”原则。
4) 符合社会对环境保护的要求。
5) 符合技术创新的规律,重视对知识产权的保护。
6) 从企业的实际工艺水平和生产能力出发,强调设计与工艺、生产相结合。
1.3 设计依据和参考标准
成都海科工控设备有限公司致力于工业自动化,在西部地区享有盛誉,我们拥有技术实力雄厚的技术团队和丰富机器人运用经验,我们与世界一线知名品牌进行合作如:安川、那之不二、雄克、台达、力士乐和上银。本次项目选用安川6关节机器人MH24、雄克、上银和台达,为项目的开展提供了雄厚的技术团队。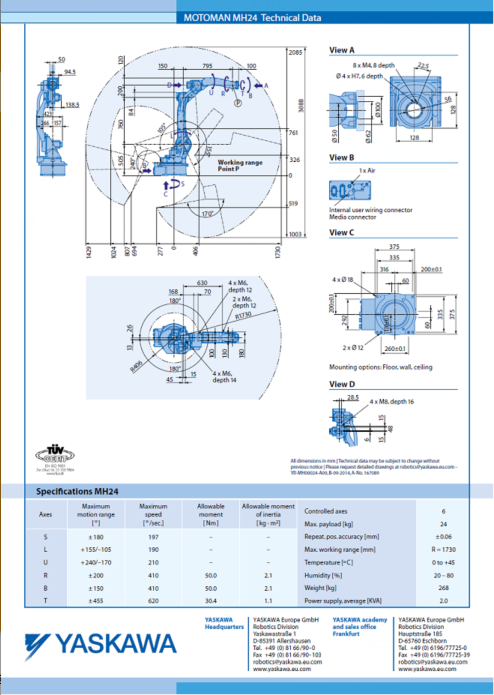
1.3.1 适用范围
CK6140机床机械手上下料方案是针对重庆顺风极力机械厂CK6140数控车床开发的专机,适应本厂的作业流程和位置布局,如有其它需求请与我们联系。
2. 系统概述
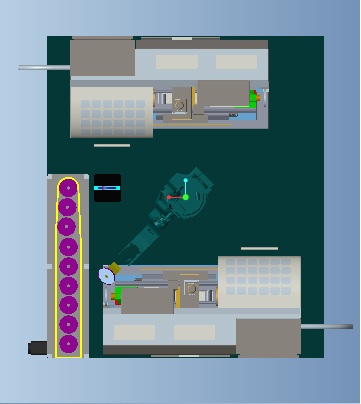
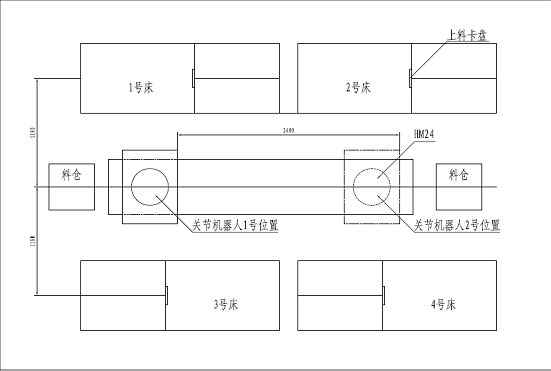
CK6140机床机械手上下料方案是机械人、机床、电气和各种检查手段于一体的综合性的项目,各个部件有条不紊的工作相互协作,完成产品的生产。布局如图1:
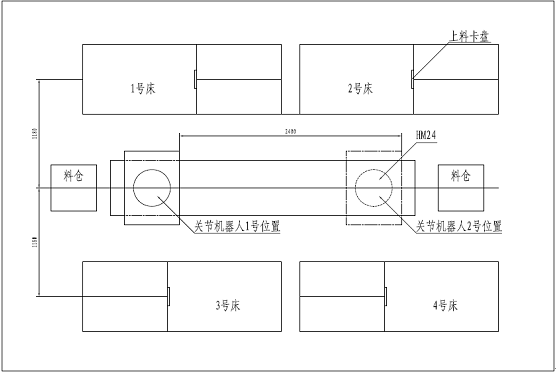
图1
2.1 系统的主要功能
CK6140机床机械手上下料由如下基本部分组成: CK6140数控车床、MH24多关节机器人、雄克气爪系统、第七轴、翻料工作台、机床门开关和来料输送线/取料输送线,本套系统为了效率提高机械手的效率采用了双料仓设计。
2.1.1 功能阐述
MH24机器人: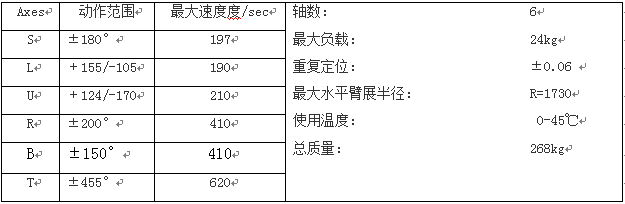
MH24机器人配合雄克的气爪和翻料工作,完成CK6140车床的上料、下料和工件的翻转,是本项目得以实施的关键部件。
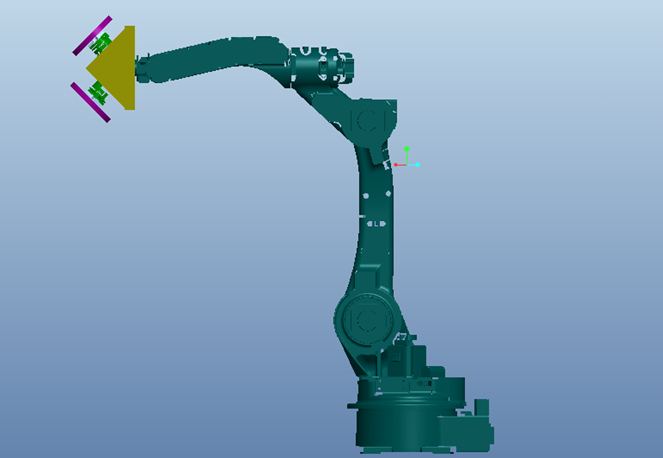
图2
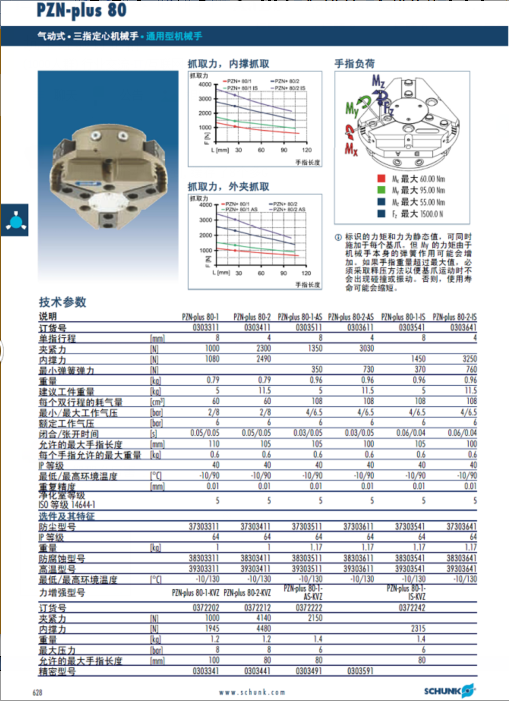
雄克气爪:
本次方案设计选用雄克气爪PZN-plus 80-1-IS和雄克弹簧压紧件A-PZN-Plus 80。PZN-plus 80-1-IS参数如下:
单指行程:8mm;
内撑力:1450N
弹簧弹力:370N
重量:0.96kg
闭合/张开时间:0.06/0.04s
重复精度:0.01mm
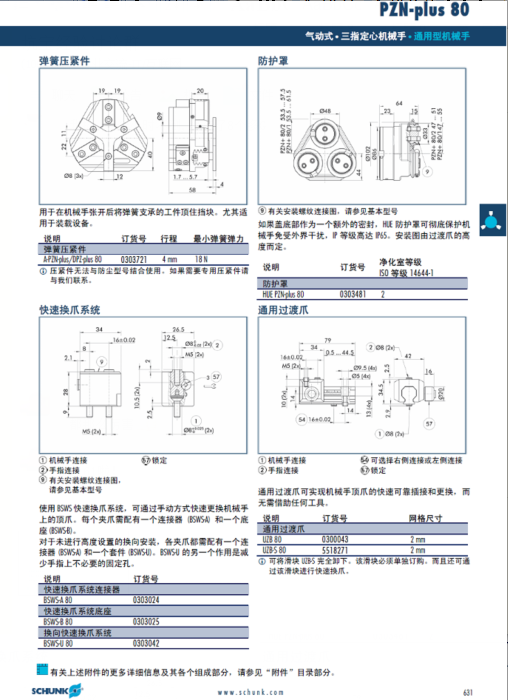
A- PZN-plus 80用于在机械手张开后将弹簧支承的工件顶住挡块,使用与装载设备。
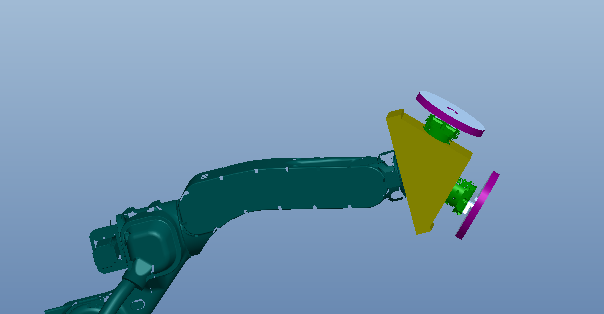
图3
第七轴:
通过图1可知1号机床到2号机床(3号机床到4号机床)上料需要机械手行走2.4米,就需要第七轴完成,第七周设计选用上银高精度直线导轨、滚珠丝杆、台达伺服和PLC完成与MH24机器联动,从而满足本方案的实施。
平均速度:400mm/s;
重复精度:±0.08mm;
翻料台:
精心设计翻料台,充分的利用6关节机械手的多自由度,降低成本。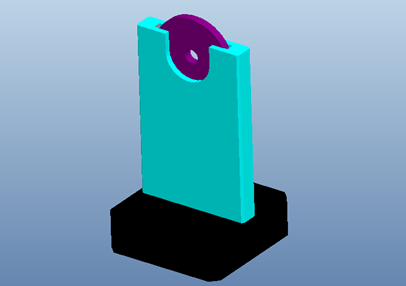
图4
自动机床开关门:
CK6140车床的仓门开关需要做自动开关控制,满足车床主轴停车且机器人来到仓门(需要添加检测传感器),仓门自动开启。机器人取完料退出仓门,检测开关收到信号,车床主轴收到信号开始工作。
来料输送线/取料输送线:
方案设计采用优化设计为尽可能提高效率,采用双来料仓和出料仓(示意图1),让机器人尽量就近取料和放料,方案做的输送来运送工件,在输送线的末端做工装定位,采用机械式保证设定原点。备用方案可做旋转料架和视觉系统来抓取工件原点,相对于机械式成本更高。
2.1.2 生产节拍分析
根据生产流程后做一下生产节拍,分析时候是预先打开机床舱门,单台机床的上下时间T1≥16s,1对4的标准上料和下料T≥64s。
如下视频:详见附件。
3. 系统结构和配置
3.1 系统总体逻辑结构
系统总体逻辑结构如图 1所示。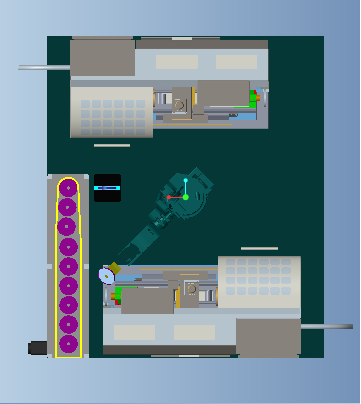

图 1系统总体逻辑结构图
4. 安装调试培训及验收
4.1 安装调试
1、卖方负责在买方现场完成所承制设备的安装,买方提供行车、叉车及用电用气、人员等的支持。
2、卖方在买方现场完成合同规定工件的单机和系统调试工作。
4.2 机器人及系统的操作培训
1、 机器人操作基础培训(在海科工控设备进行1人次3天的操作培训)。
2、 卖方对买方进行系统操作编程培训指导(在安装现场进行2天)。
3、 涉及买方人员的差旅和交通住宿等费用未包含在内,由买方自行承担。
4.3 验收
验收分为预验收与终验收。预验收在卖方工厂进行,终验收在买方工厂进行。
在设备达到以下条件时,买方必须进行预验收和终验收:
4.4 提供资料
卖方向买方提交如下技术资料:
1、 系统使用说明书:中文版1套。
2、 机器人操作说明书、保养说明书:中文1本。
3、 机器人控制器说明书:中文1本。
4、 电气图纸(原理、接线、柜内布置、电缆清单):1套(pdf格式)。
5、 设备(如:抓手、传送带)总装图纸及易损件零件图:1套(pdf格式)。
6、 备件清单。
5. 质量保证
1、 质保期:机器人系统终验收后一年内或机器人系统到达买方现场一年以内。
2、 在质保期间内,如果不是因为买方的责任而发生故障的情况下,维修用部品或者更换由卖方无偿运输至买方。
3、 即使在质保期间内,卖方将不承担下述情况所发生的费用。
4、 购买后由于买受方或者第三者的不当修理、改造、转移或者使用上不注意引起的损坏。
5、 由火灾、水灾、地震、雷电或其他不可抗力所引起的损坏。
6、 转卖、转让、赠与第三方等情况。
7、 不按使用说明书上所要求的进行适当的维修保养作业而发生的损坏。
8、 即使在质保期间内,有关消耗品也不属于质保的范围。
9、 卖方的责任只限于本协议书所描述的内容,这之外的责任卖方不承担。
6. 买方责任
1、 需向卖方提供准确、详细的相关工件、设备及车间布局的图纸及足够的铸件。
2、 负责对现场进行改造以适合机器人系统的安装要求。
3、 确保满足条款“5.环境条件”中的所有条件。并负责把电源气源接到卖方现场指定位置。
4、 根据实际情况制作空调房。
5、 负责提供充足的现场调试用工件,以及保证周边设备的正常运行。
6、 对机器人系统的安装调试提供必要的水、电、压缩空气、叉车行车等的使用支持。
7、 在设备达到验收条件时负责对设备进行验收。

 川公网安备51012202001782
川公网安备51012202001782