
摘要:以实际需求为基础,对机械设计中实际遇到的X-Z两轴系统机型物理模型进行简化,对直线产品需求进行计算选型,提供伺服电机、行星减速机、电机座、丝杠支撑座、丝杠、导轨的选型。计算选型中有很多趋于安全的简化,使计算更安全,更具有可操作性。
关键词:直线导轨、滚珠丝杠、伺服电机、丝杠支撑座、电机支撑座。

一、水平移动机构
负载重量:800kg;
速度:40mm/s;
重复精度:0.05mm
(一)导轨选型:
采用双轨道,4滑块的形式,每个滑块负载约为200kg,由于没有给出具体的使用寿命要求,试选滑块的基本动额定负荷是实际负载的5倍,则滑块的基本动额定负荷要求,大于1000kg,根据这个值,选择直线导轨。
导轨型号:HGH20CA2R1240ZAC 2根;(导轨长度可按照机械设计调整。)
(二)丝杠选型:
1、加速时间预设0.2s则加速度:
a=0.04/0.2=0.2m/s^2
2、轴向力:F=MGμ+Ma=800*9.8*0.1+800*0.2=944N
根据轴线力,选择丝杠,丝杠基本动负荷是负载8倍。
丝杠型号:R20-5T4-FSI-800-1000-0.05 (HIWIN)
推荐丝杠支撑座:FK15、BF15 (华准)
(三)电机选型:
1、计算丝杠所需扭矩:T*2000*3.14=944*5
T=0.75nm;
2、计算系统惯量:
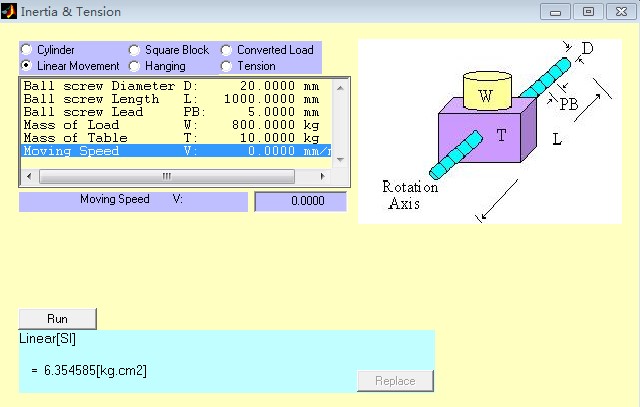
系统惯量:J=6.35KG;
根据扭矩判断,伺服电机的功率在400W就能满足要求,但是惯量不能满足要求,引入行星减速机:速比5,
则等效惯量:J1=6.35/5^2=0.254(KG.CM^2)
推荐伺服电机:ECMA-C10604RS (台达)
推荐减速机:AB060-5-S2-P2/60 (上海涟恒)
推荐电机座:M60D+FK15 (华准)
推荐联轴器:LC-A-305SA-16B-12B (龙创)
二、垂直提升机构
提升重量1800kg;负载有偏心。
(一)、导轨选型:
1、重心偏心估算,前后方向:偏心300mm;左右方向:偏心1000mm;
2、则前后偏心产生的扭矩:1800*9.8*0.3=5292Nm;
3、偏心导致的滑块复负载为,滑块的间距:820mm
F*0.82=5292
F1=6435N,上面的滑块受拉力,下面的滑块受压力。
4、左右偏心产生的扭矩:1800*9.8*1=17640Nm;
5、偏心导致的滑块负载:F*0.82=17640
F2=21512N
6、滑块受力标量相加:F=F1+F2=6435+21512=27947N
由于上下各有2个滑块受力,理论上靠近偏心一侧的滑块受力更大,但是分析比较复杂,我们简化计算,预留大一点的安全系数。则单个滑块的受力为:13974N
7、滑块系数取值7倍,F=13974*6=83844N则推荐滑块
推荐导轨:HGW55CC2R2260ZAC 2根(导轨长度可按照机械设计调整。)
(二)丝杠选型:
1、轴向力:F=Mg+F*μ+Ma=1800*9.8+27947*0.1+1800*0.2
F=20795N
根据轴向力,选择丝杠:R50-10T4-FSI-1500-1800-0.05 (HIWIN)
丝杠支撑座:FK40、FF40 (华准)
(三)电机选型:
1、丝杠需要扭矩:
T*2000*3.14=20795*10
T=33Nm
2、计算丝杠转速:40*60/10=240rpm
推荐减速比:i=7
则电机的转速:240*7=1680rpm,建议选择2000rpm额定转速的中惯量电机:电机扭矩大于:33/7=4.7NM
3、推荐电机:ECMA-E11315SS (台达)
4、推荐减速机:AB115-7-S2-P2/130 (上海涟恒)
5、推荐联轴器:LC-A-060DA-32B-35B (龙创)
6、惯量校核:略。根据经验,垂直提升丝杠机构,扭矩够了,惯量都足够。
以上,供参考!
成都海科工控技术部

 川公网安备51012202001782
川公网安备51012202001782