
单轴机械手臂种类繁多,又称精密定位滑台、精密线性模块、电动滑台、引动器(Actuator)等,在自动化工业中扮演关键角色。单轴机械手臂是机电整合的具体实践,也是产业机器人的基础,是这个领域的工程师必须熟识的技术。机械手臂产品的种类虽然很多,但是基本构造却大同小异,本文将从使用者的角度就基本构造、使用寿命、承载负荷等方面提供选用要领,期使第一线的工程师对本类产品的应用能更顺手。
关键词:单轴机械手臂、基本构造、使用寿命、承载负荷
在产业机器人中,应用广泛的当属单轴机械手臂。单轴机械手臂看似简单,只在单一方向往复运动,但在实际应用上功能各异,种类繁多。由于构造简单,一般教科书甚至把它当作计算的例题。可是使用者往往发现,虽然它看似很简单的东西,要能真正全面深入做精确的计算却并不容易。理论和实际之间毕竟存有差距,例如摩擦系数就很难确定,而且工程师通常没有那么多时间仔细的一步一步推导公式。不但如此,单轴机械手臂的应用正是典型的机电整合,既要计算负荷、结构,也要匹配马达和控制,还必须从数以百计的厂商型录中挑选适合的产品,过程冗长而且复杂。因此,本文拟为第一线的工程师或产品选购者提出一些解说,由基本的认识切入,让使用者能更正确地判
读厂商型录,选用产品时也更省力。
单轴机械手臂的驱动方式有:滚珠螺杆、时规皮带、齿轮齿条、线性马达、液压缸、气压缸等。限于篇幅,本文将以滚珠螺杆型机械手臂的机械结构为主,从使用者的角度针对应用上必须注意的要领列举一二供读者参考。

图1 单轴机械手臂构造
基本构造
单轴机械手臂构造简单,常见的形式如图1所示。其中,滑台承载负荷,负荷传递到线性滑轨上,滚珠螺杆负责推动滑台,马达则通过联轴器驱动螺杆。螺杆的支撑通常靠近马达端的轴承为固定端,另一端为支撑端。
滚珠螺杆的转速有限制,在共振发生之前的高转速称为临界转速。为免发生共振,常以临界转速的80%当作容许转速,计算方式如下:
其中
Np = 容许转速 (RPM)
Mf = 组装型式系数,例如固定-支撑 Mf = 0.689
dr = 螺杆根径 (mm)
Lr = 轴承间的螺杆跨距 (mm)
由于容许转速和跨距的平方成反比,大大限制了螺杆的长度,机械手臂的有效行程也因而受到限制。所以选用单轴机械手臂的第一步,先确认工作运转的速度(mm/sec),用螺杆导程换算成螺杆的转速(RPM),再以此转速确认螺杆跨距及有效行程。
有些产品虽然提供足够长的行程,但是由于共振的限制,超过某个规定长度以上会限制转速,超过愈多,转速降得愈多,应特别注意。
如果工作行程确实很长,则须选用长行程的产品。目前长行程的机械手臂除了线性马达和皮带驱动者外,滚珠螺杆型的有两种:一是旋转螺帽式,螺杆本身根本静止不转,靠中空马达驱动螺帽;另一种是在跨距中间增设移动式的螺杆支撑座,形同跨距减半,螺杆总长度达2,500mm不成问题。
使用寿命
困扰使用者的,大概是使用寿命的计算。寿命和负荷直接相关,简单的说,负荷轻松则长寿,负担劳苦则短命;寿命和负荷必须相提并论。
单轴机械手臂的基本构造有三个关键组件,滚珠螺杆、线性滑轨、轴承,都是运用滚珠的组件,各有其使用寿命。「寿命」都和「基本动额定负荷」有关,因此欲计算寿命,必须先提出负荷条件,亦即承载的方式、方向、重量、距离、运动方式等等,计算出等效负荷,接着再用等效负荷计算寿命,计算过程十分复杂。
大部分的单轴机械手臂制造厂商并不会让使用者自己计算寿命,而是给一个经过换算的既定寿命值,例如行走5,000 Km或是10,000 Km,然后限制欲达到此寿命的容许负荷条件。
要注意的是,此容许负荷并非从结构强度的观点来理解,而是表示某一寿命值的参考负荷点。例如某厂商设定产品寿命10,000Km,并且给了一个容许负荷表,其意义是指如果负荷状况超过表列的容许值则寿命将短于10,000Km,反之如果实际负荷低于容许值,则使用寿命将高过10,000Km。当然,为了延长使用寿命,应用时尽可能不要超过容许负荷为宜。
虽然单轴机械手臂中有滚珠螺杆、线性滑轨、轴承等三个关键组件,但是除了垂直安装(Z轴)或大角度倾斜安装之外,承载负荷的组件仍以线性滑轨为主,螺杆只负责推力,不承担重量,故寿命计算也是以线性滑轨的动额定负荷为计算基础。
线性滑轨的寿命计算式如下:
其中
L = 预期寿命
fh = 硬度系数
C = 基本动额定负荷
ft = 温度系数
Pc = 计算所得的等效工作负荷
fw = 负荷系数
对单轴机械手臂而言,上式其实只提供了一个重要的讯息:寿命和负荷的三次方成反比,意即稍微增加负荷就会使寿命快速减少。上式难以直接套用的关键是Pc的计算。
使用者在选用阶段从型录上或厂商提供的CAD图上根本看不到单轴机械手臂的内部构造和尺寸,也难以知道采用的是什么规格的线性滑轨,要自己做精确的寿命计算非常困难,更何况上列公式在解释和利用上都很麻烦。
所以单轴机械手臂制造厂商为了使用者的方便,在型录上都会直接注记其设定寿命是多少「行走距离」(必要的话,使用者必须根据自己的运用条件换算成时间寿命),并且列出相对应的容许负荷值,只要不超过,寿命至少就可以达到预设的值。至于寿命增加或减少的确实数值,则必须用原厂商提供的公式、软件,或径洽该厂商才能做出比较正确的计算。
承载负荷
如前所述,型录上的负荷限制是以一定寿命(行走距离)为准,常见的表现方式如图2所示。各厂家对于负荷的作用位置也许定义不同,应用时请注意。
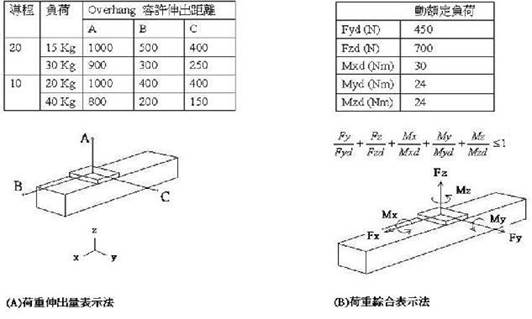
图2 负荷条件表示法(以既定寿命为基准)
图2(A)中,A、B、C三点的距离代表负荷作用点的位置向量的三个分量:上下(z)、前后(x)、左右(y),向量原点在滑台安装面的中心。这种表示法是以力矩的计算做基础,限制负荷在三个轴向的悬臂伸出量(overhang)。例如图中,螺杆导程10时,负荷20
Kg可以在z方向(A)离开滑台中心1000mm,在x方向(B)离开滑台中心400mm,在y方向(C)离开滑台中心400mm,只要是不超出这些伸出量的范围,此负荷(20
Kg)就可以达到既定的寿命,比如说10,000 Km。
读者也许会好奇,z方向在滑台的正上方,为何会有负荷高度的限制?20 Kg放在滑台上和放在800mm高处有何不同?这是因为负荷加减速时会产生向前或向后的惯性力,因而造成俯仰力矩(pitching),厂家在寿命计算时已经将此加减速的惯性负荷列入计算了。
图2(A)表现法的缺点是不连续,例如螺杆导程10,但使用者的负荷是30 Kg,只好用线性内插计算,求个一定不精准的参考值。也就是说,如果负荷或是伸出量不是按照表列值,则「寿命」究竟增加或减少多少就难以掌握了。
图2(B)是将负荷「放」在滑台安装面的中心。所谓「放」是指利用力的平移特性,以及力可转换成力和力矩的合成特性,将实际负荷「移」到滑台的中心,即可得到x-y-z三个方向的力和力矩。将此负荷分量和动额定负荷做比较,得出各负荷分量的「贡献」,如果合成作用的结果不超过动额定负荷的规定范围(≦1),则寿命就可以达到预设的寿命值,比如说1,000 Km。当然,和图2(A)的缺点一样,如果计算出来的值大于1或小于1,寿命究竟会减少或增加多少,也是无法得知。
图2(B)的计算式中没有Fx,这是因为这种计算法分成两个部份,一是寿命的计算,一是推力的计算。寿命计算以线性滑轨为基础,在x方向移动不承载负荷,故Fx对寿命没有贡献,以寿命为基准的负荷限制公式自然就没有Fx项了。
关于推力,型录上的「额定推力」来自于螺杆转速的限制,计算流程如图3所示。其中滚珠螺杆的临界转速必须参照螺杆厂商的型录计算,这个部份单轴机械手臂的使用者也是无法自行处理的。推力Fx算出来之后,就是滚珠螺杆的负荷,可以用来计算螺杆的寿命。就单轴机械手臂而言,水平安装的一般操作条件下,重量负荷主要由线性滑轨承担,螺杆寿命比滑轨长得多,通常可以不必考虑。
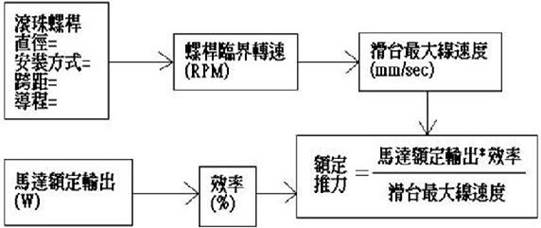
图3 额定推力计算流程
但是,如果单轴机械手臂是应用在垂直安装的场合(z轴),承载负荷就必须特别考虑。因为此时挂在滑台上的工作负荷以及运动的推力,全都靠滚珠螺杆那几圈钢珠在支撑。更仔细一点分析,包含螺杆在内的一切负荷其实全由固定端的轴承在支撑,若要检讨寿命,就必须以滚珠螺杆和轴承的基本动额定负荷为依据了,特别是固定端轴承的轴向动额定负荷。
此外,单轴机械手臂型录上还有一项重要注记:可搬质量,分为水平和直立两项。这项参数来自额定推力,影响参数包括导程、摩擦系数、额定加速度。小导程时,运动速度慢,惯性负荷比较小,可搬质量就比较大。中高导程时,加速度高(计算时通常预设0.3G)可搬质量就比较小。直立安装时,除了考虑滚珠螺杆和固定端轴承的负荷之外,还有重力加速度(1G)的因素,可搬质量就更小了,大约只有水平的1/3.5~1/6不等。至于滚珠螺杆和线性滑轨组装成机械臂之后的系统总摩擦系数,只有制造厂商自己实验测定,没有理论值可以参考。对使用者来说,可搬质量也是只能依循的参考数值,如果实际应用的运动加速度不是0.3G,增减多少G可以增减多少可搬质量也是难以自己计算得准确的。
综合以上所述,适当的应用法,并非由使用者自己做任何有关产品本身特性的计算,而是在安全范围之内选用适合的产品,并且遵守承载负荷的要求,寿命即可达到原制造厂商的默认值。
文章节选:综欣科技网站
成都海科技术部

 川公网安备51012202001782
川公网安备51012202001782