
摘要:桁架机器人,作为一种成本低廉、系统结构简单的自动化机器人系统解决方案,广泛的用于码垛、分拣、包装、焊接、金属加工、搬运、上下料、装配等常见的工业生产领域,在替代人工,提高生产效率,稳定产品质量等方面都具备显著的应用价值。本文就典型的桁架机器人为例,对已知要求的桁架机器人进行直线产品选型计算,希望对广大桁架机器人设计及应用厂家有所帮助。
关键词:桁架机器人、齿轮齿条、伺服电机、行星减速机、滚珠丝杠、滚珠丝杠支撑座。
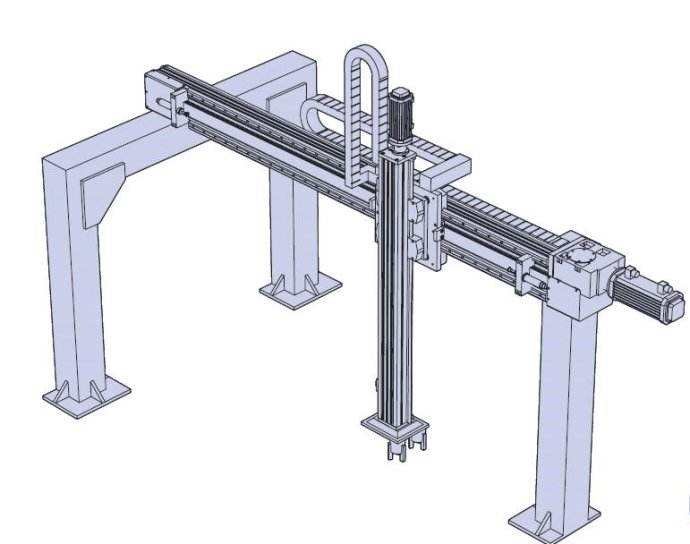
一、 机器人基本要求:
桁架机器人用于物料搬运机构,动作包括Z轴垂直提升机构和X轴水平移动机构,各轴的参数如下。
1、 Z轴:垂直提升机构
负载重量:40kg;
动作行程:800mm;
速度可达到:400mm/s
由于Z轴本体需要上下移动,本体重量会变为负载,重量:80kg
定位精度:0.1mm
加速时间:0.2s
2、 X轴:水平移动机构
负载重量:180kg;
动作行程:5.8m
移动速度:1.3m/s
加速时间:0.3s.
定位精度:0.2mm
二、 计算选型
(一)Z轴:
采用丝杠提升,直线导轨导向的结构,根据机械设计确认一些尺寸参数如下。机械结构采用中间丝杠,两侧导轨的结构,每根导轨上2个滑块,滑块上下方向的中心距为:200mm。Z轴总重量为M=120kg,重心距离导轨的安装面距离为300mm。
说明:在导轨垂直安装时,很多人认为导轨不受力,只有丝杠受力,导轨只是起导向作用。这个理解是不完整的。如果被提升负载的重心在丝杠的中心线上,这个理解是正确的,但是如果重心的位置和丝杠中心线存在一定的间距,那么导轨就必然要受力。具体的计算方法是,丝杠解决力平衡,导轨解决力矩平衡。
1、 导轨选型计算
根据已知条件,重心偏心300mm,滑块上下方向中心距400mm.则做力矩平衡计算。滑块受力为:F,则公式如下:
F*200=Mg*300=120*9.8*300
F=1764N, (这是滑块的受力,上面两个滑块受拉力,下面两个滑块受压力)。
单个滑块的受力为:F1=F/2=882N
根据这个受力来进行滑轨的选型,如果知道设备的设计寿命,按照导轨的设计寿命公式进行计算(本网站其它文章有介绍),如果是简单计算选型,建议滑块的基本动额定负荷是实际载荷的5倍。则滑块基本动额定负荷大于882*5=4410N,只要滑块的基本动额定负荷大于这个值就可以了。查询资料选型导轨。
HGH15CA2R1100ZAC 2根 (导轨长度以机械设计为准。)
2、 丝杠选型计算
导轨的安装将力矩进行平衡以后是丝杠进行力平衡,考虑到实际使用中负载在加速向上运行时轴向力大:
F3=Mg+F*μ+Ma
加速度:a=v/t1=0.4/0.2=2m/s^2
考虑安装平行度的误差,系统摩擦系数:μ=0.1
F3=120*9.8+1764*0.1+120*2=1592.4N
预选丝杠的导程10mm,因为速度要求是400mm/s,则丝杠的转速:400/10*60=2400rpm。伺服电机的额定转速一般为3000rpm,所以选择合理,如果选用5mm导程的丝杠,则丝杠转速为4800rpm,超电机的额定转速,显然不合理。
根据载荷,选则丝杠的基本动额定负荷是载荷的8倍以上,则丝杠型号:
R25-10T4-FSI-X-Y-0.05 (X是丝杠的螺纹长度,Y是丝杠总长度)
3、 电机的选型计算
T电机*2000*3.14*0.8=F3*10=1592.4*10 (10为丝杠的导程)
T电机=3.16Nm,考虑电机驱动的安全系数。
推荐电机:ECMA-C11020SS(电机带刹车,保证断电时不下滑)
(二)、X轴
采用上下方向水平安装导轨,中间齿轮齿条的结构。根据结构尺寸,滑轨的上下方向中心距200mm。采用双轨4滑块的机构。重心距离导轨安装面距离:500mm。
1、 导轨的选型计算:
力平衡:4个滑块分担重力:F4=180/4=45kgf=450N
力矩平衡:180*9.8*500=F5*200;F5=4410N=441kgf。这是由两个滑块承担力,上面块受拉力,下面受压力。单个滑块受力:221kgf.
滑块的合力:直接两个力的标量和:F6=45+221=266kgf;
根据这个合力,放大5倍以上选择滑块的型号:
HGW25CA2R6300ZAC 2根 (导轨长度以机械设计为准。)
2、 齿轮齿条及电机选型计算:
试选齿轮:m=2,Z=30,节圆直径:d0=63.66mm=6.366cm
计算负载的转动惯量:
J=M*d0^2/4=180*6.366^2/4=1824kg.cm^2
计算齿轮转速:1300*60/3.14/63.66=390rpm
预估电机会用到中惯量的电机,额定转速为:2000rpm.
则可选择的减速比:i=2000/390=5.12。推荐行星的标准减速比为:i=5
则等效惯量:J1=J/i^2=1824/5^2=72.96(kg.cm^2)
查询电机参数选型:ECMA-E11315RS,电机惯量:11.18(kg.cm^2);惯量比:72.96/11.18=6.5倍,小于10倍.能够满足要求.
计算加速度:1.3/0.3=4.3m/s^2
计算水平推力:F7=Mg*μ+Ma=180*9.8*0.1+180*4.3=950.4N
计算齿轮扭矩:T齿轮=F7*d0/2000=950*63.66/2000=30.23nm,校核齿轮齿条的传递扭矩:184nm。计算安全系数184/30.23=6。安全系数大于5足够。
计算所需电机扭矩:T1=30.23/5/0.9=6.7NM, (0.9为减速机的效率)
此案前选择的电机额定扭矩:7.16Nm,大于T1,电机扭矩足够。
推荐电机:ECMA-E11315RS 台达电机
推荐减速机:AF090-5-K3-22 卓蓝减速机
推荐齿轮:CHMH020 30 22 YYC齿轮 (安装孔22,和减速机的输出轴配合)
推荐齿条:CHTMH020 10 YYC齿条
成都海科技术部

 川公网安备51012202001782
川公网安备51012202001782